
Harshal Bhat
Robotics & Networking Engineer, sim2real gap builder
MS Robotics student at WPI with expertise in computer vision, control systems, and machine learning. Building intelligent systems that perceive and interact with the world.

About
Background
I'm a graduate student pursuing my Master's in Robotics at Worcester Polytechnic Institute. My research interests span control theory, computer vision, and reinforcement learning.
I've led multiple technical projects, published patents, and secured startup funding for autonomous systems. Currently seeking full-time opportunities starting Spring 2025.
4.0
GPA
16+
Projects
2
Patents
Education
Academic Background
2023 — 2025
MS Robotics Engineering
Worcester Polytechnic Institute
GPA: 4.00
2018 — 2022
BTech Mechanical Engineering
VJTI, Mumbai University
GPA: 8.28/10
Experience
Work History
Software Engineer
Magna International
- Implementing firmware enhancements for Lift and PDB systems on AMRs
- Developing PLC logic for Sick Safety LiDAR custom safety fields
ML / Product Intern
Magna International
- Built HTTP/gRPC API simulator enabling offshore UI development without hardware
- Designed collision avoidance system fusing BLE + depth camera, deployed on Jetson Nano
- Optimizing ORB-SLAM3 with lightweight structure graph relocalization
Technology Consultant
PwC India
- Led AWS cloud migration for 50 Qlik applications with data visualization pipelines
- Optimized Redshift queries achieving 60% performance improvement
- Developed Spark scripts with Docker, Bitbucket, JIRA integration
R&D Intern
IIT Ropar
- Designed autonomous harvester with AMCL navigation for 15 crop types
- Integrated IMU, GPS, encoders with ROS mapviz and Google Maps API
- Published patent at Indian Patent Office
Research
Patents & Publications
Granted
An Autonomous System For Low Payload Gripper Changing Mechanism
Indian Patent No. 528223 — View Patent
Conference
Vibration Analysis of Hydrodynamic Conical Journal Bearing using ML
ICIT 2022, New Delhi — View Presentation
Projects
Selected Work
3D Stereo Vision for Pseudo LiDAR

Road Segmentation
UKF Object Tracking
Neural Radiance Fields
Einstein Vision Pipeline
UAV Interception with LQR
Adaptive Cruise Control
DynaPRM Exploration

ML Vibration Analysis
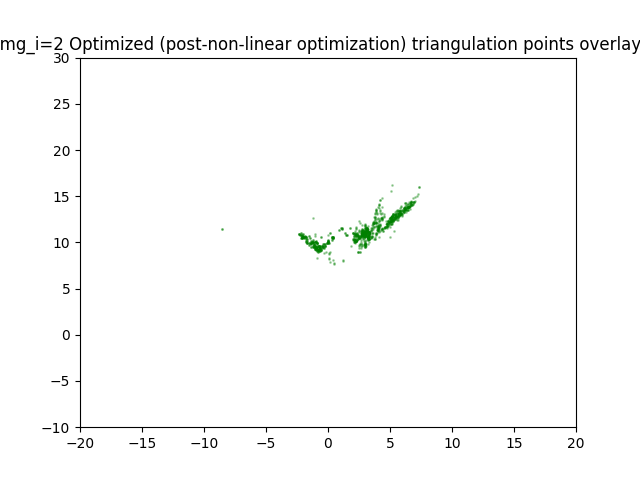
Structure from Motion
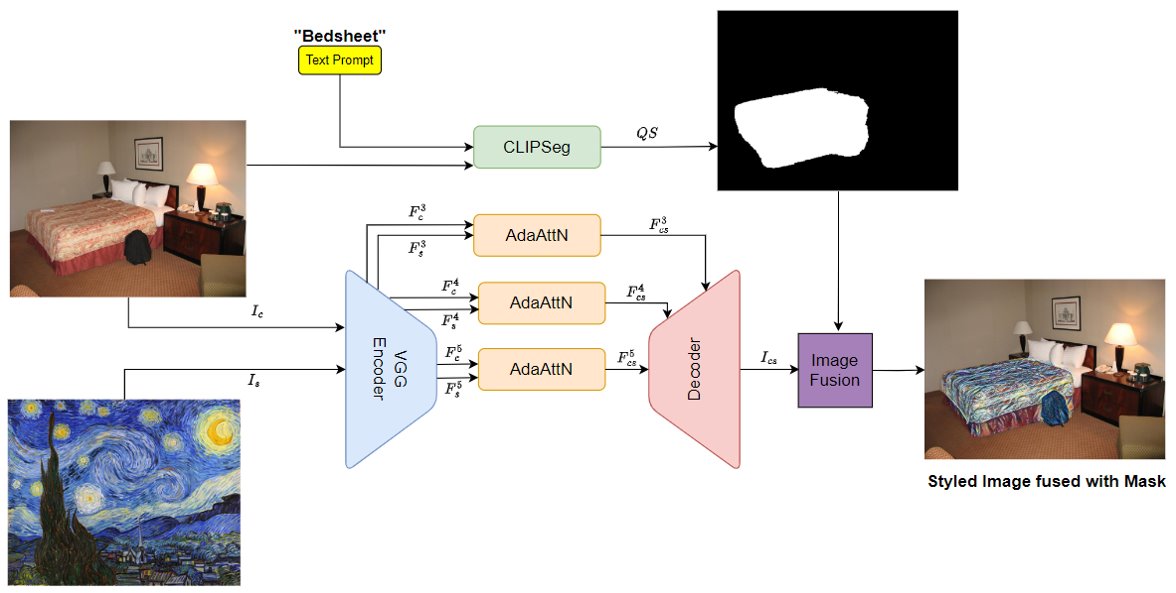
Neural Style Transfer
Skills
Technical Expertise
Languages
Python
C++
MATLAB
SQL
Frameworks
ROS2
PyTorch
OpenCV
TensorFlow
Tools
Git
Docker
AWS
Linux
Simulators
Gazebo
CARLA
AirSim
Simulink
Recognition
Awards & Honors
Feb 2022
Startup Grant — IIT Ropar
$12,000 grant for autonomous harvesting robot venture through TIF-AWaDH program.
Jan 2022
IEEE VJTI — 1st Runner Up
Technical paper on behavioral cloning for autonomous vehicles using imitation learning.
Contact
Get in Touch
I'm currently looking for full-time opportunities starting Spring 2025. Feel free to reach out.